Не вытерпел и собрал )))
Работает )).......
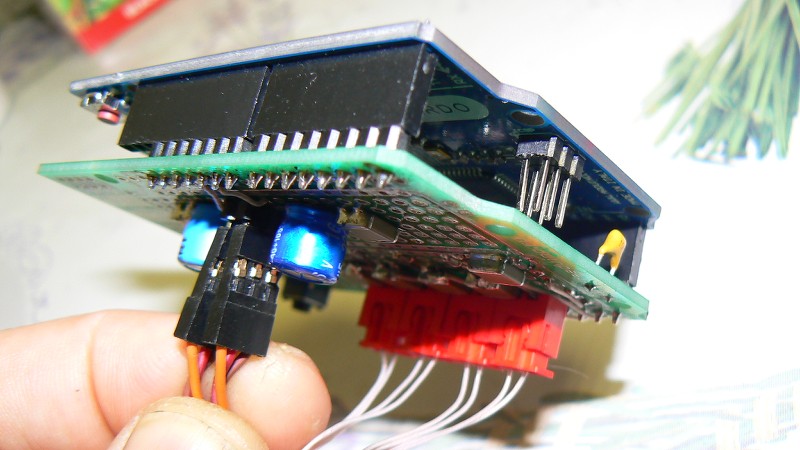
Чтобы было понятно с такого ракурса
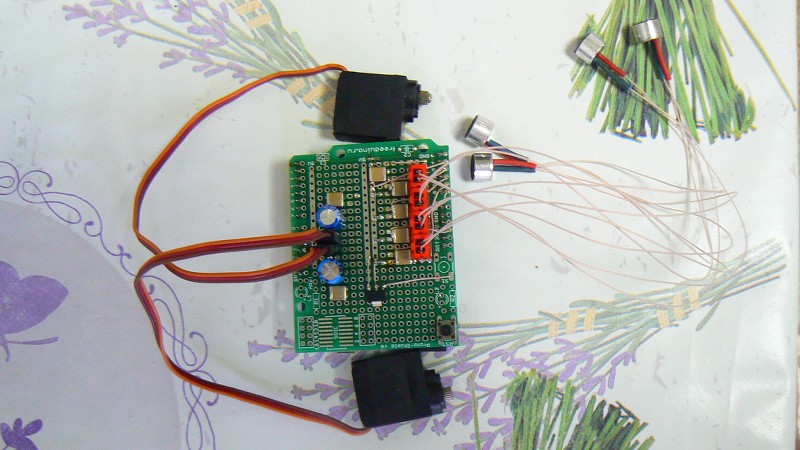
Собрал я используя Proto-Shield - Макетная плата для Arduino.
Давненько купленная у этих ребят с Кемерово
http://freeduino.ru/arduino/products.html#Dopolnitelbnbe_moduliНо устройство нужно собрать полностью чтобы оценить как оно работает.
Дальше автор применил различную фильтрацию звука - реверберация в случае использования в замкнутом пространстве. Устройство адаптивное и настроившись на объект понимает его звук и может отличить к примеру самолет или вертолет.
Применена регулировка усиления микрофонов.
По этому я на тесте использовал пищалку прозвонки мультиметра .
Не знаю что причиной - не собранное устройство - реакция машинок на изменение в положения пространстве источника звука отсутствует к примеру .
Но машинки очень медленно двигаються.
Хотя автор упоминал на одном из мест публикации что быстро сделать не возможно , якобы из-за физики звука.
Но писал что на расстоянии до 650 метров будет позиционирование с точностью до 1 градуса ( если гугл все корректно перевел).
Так же если просматривать код есть в коде строки реализации каких то режимов , но коментарии там очень краткие и не понятноые.
Но на фото видно что он использовал выводы и схемы нет на эти выводы .
Но устройство было трижды изменено и возможно фоты не относяться к крайней версии архив котрой я выложил.
Нужно разбираться короче .
Автор еще 2012 году перестал откликаться на тему этого проекта .
Но проект не оставил а перевел его на более мощную платформу.
https://forum.arduino.cc/index.php?PHPSESSID=dga5uumt16u1nb4ab5f9669dd6&topic=125860.0Сразу кто будет повторять подчеркну чтоб уменьшить траблы .
Так как может быть рассинхрон а автор не подписал какие микрофоны как позиционируються
Yнижний - AN0
Yверхний - AN1
Xправый - AN2
Xлевый - AN3
Сервы ( в принципе это есть в листинге скетча)
Горизонтальная - 10
Вертикальная -11
---------------------------------------
Короче буду собирать дальше и пробовать)).
Выкладываю правленый скетч, там только одна команда была с устаревшей транскриптцией .
Еще раз большая благодарность Александру за помощь в реализации этого проекта .

